In the not too distant future, we can expect to see our skies filled with unmanned aerial vehicles (UAVs) delivering packages, maybe even people, from location to location.
Copyright by research.utexas.edu
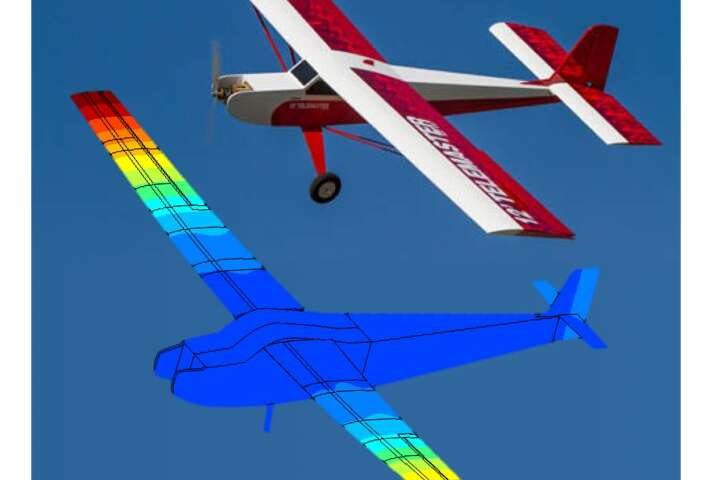
 In such a world, there will also be a digital twin for each UAV in the fleet: a virtual model that will follow the UAV through its existence, evolving with time.
In such a world, there will also be a digital twin for each UAV in the fleet: a virtual model that will follow the UAV through its existence, evolving with time.
“It’s essential that UAVs monitor their structural health,” said Karen Willcox, director of the Oden Institute for Computational Engineering and Sciences at The University of Texas at Austin (UT Austin) and an expert in computational aerospace engineering. “And it’s essential that they make good decisions that result in good behavior.”
An invited speaker at the 2019 International Conference for High Performance Computing, Networking, Storage and Analysis (SC19), Willcox shared the details of a project—supported primarily by the U.S. Air Force program in Dynamic Data-Driven Application Systems (DDDAS)—to develop a predictive digital twin for a custom-built UAV. The project is a collaboration between UT Austin, MIT, Akselos, and Aurora Flight Sciences.
The twin represents each component of the UAV, as well as its integrated whole, using physics-based models that capture the details of its behavior from the fine-scale to the macro level. The twin also ingests on-board sensor data from the vehicle and integrates that information with the model to create real-time predictions of the health of the vehicle.
Is the UAV in danger of crashing? Should it change its planned route to minimize risks? With a predictive digital twin, these kinds of decisions can be made on the fly, to keep UAVs flying.

Bigger than Big Data
In her talk, Willcox shared the technological and algorithmic advances that allow a predictive digital twin to function effectively. She also shared her general philosophy for how “high-consequence” problems can be addressed throughout science and engineering.
Thank you for reading this post, don't forget to subscribe to our AI NAVIGATOR!
“Big decisions need more than just big data,” she explained. “They need big models, too.”
This combination of physics-based models and big data is frequently called “scientific machine learning.” And while machine learning, by itself, has been successful in addressing some problems—like object identification, recommendation systems, and games like Go—more robust solutions are required for problems where getting the wrong answer may be incredibly costly, or have life-or-death consequences.
“These big problems are governed by complex multiscale, multi-physics phenomena,” Willcox said. “If we change the conditions a little, we can see drastically different behavior.”
In Willcox’s work, computational modeling is paired with machine learning to produce predictions that are reliable, and also explainable. Black box solutions are not good enough for high-consequence applications. Researchers (or doctors or engineers) need to know why a machine learning system settled on a certain result.
In the case of the digital twin UAV, Willcox’s system is able to capture and communicate the evolving changes in the health of the UAV. It can also explain what sensor readings are indicating declining health and driving the predictions.
Real-Time Decision-Making at the Edge
The same pressures that require the use of physics-based models—the use of complex, high-dimensional models; the need for uncertainty quantification; the necessity of simulating all possible scenarios—also make the problem of creating predictive digital twins a computationally challenging one.
That’s where an approach called model reduction comes into play. Using a projection-based method they developed, Willcox and her collaborators can identify approximate models that are smaller, but somehow encode the most important dynamics, such that they can be used for predictions.
“This method allows the possibility of creating low-cost, physics-based models that enable predictive digital twins,” she said. […]
Read more – research.utexas.edu


In the not too distant future, we can expect to see our skies filled with unmanned aerial vehicles (UAVs) delivering packages, maybe even people, from location to location.
Copyright by research.utexas.edu
“It’s essential that UAVs monitor their structural health,” said Karen Willcox, director of the Oden Institute for Computational Engineering and Sciences at The University of Texas at Austin (UT Austin) and an expert in computational aerospace engineering. “And it’s essential that they make good decisions that result in good behavior.”
An invited speaker at the 2019 International Conference for High Performance Computing, Networking, Storage and Analysis (SC19), Willcox shared the details of a project—supported primarily by the U.S. Air Force program in Dynamic Data-Driven Application Systems (DDDAS)—to develop a predictive digital twin for a custom-built UAV. The project is a collaboration between UT Austin, MIT, Akselos, and Aurora Flight Sciences.
The twin represents each component of the UAV, as well as its integrated whole, using physics-based models that capture the details of its behavior from the fine-scale to the macro level. The twin also ingests on-board sensor data from the vehicle and integrates that information with the model to create real-time predictions of the health of the vehicle.
Is the UAV in danger of crashing? Should it change its planned route to minimize risks? With a predictive digital twin, these kinds of decisions can be made on the fly, to keep UAVs flying.
Bigger than Big Data
In her talk, Willcox shared the technological and algorithmic advances that allow a predictive digital twin to function effectively. She also shared her general philosophy for how “high-consequence” problems can be addressed throughout science and engineering.
Thank you for reading this post, don't forget to subscribe to our AI NAVIGATOR!
“Big decisions need more than just big data,” she explained. “They need big models, too.”
This combination of physics-based models and big data is frequently called “scientific machine learning.” And while machine learning, by itself, has been successful in addressing some problems—like object identification, recommendation systems, and games like Go—more robust solutions are required for problems where getting the wrong answer may be incredibly costly, or have life-or-death consequences.
“These big problems are governed by complex multiscale, multi-physics phenomena,” Willcox said. “If we change the conditions a little, we can see drastically different behavior.”
In Willcox’s work, computational modeling is paired with machine learning to produce predictions that are reliable, and also explainable. Black box solutions are not good enough for high-consequence applications. Researchers (or doctors or engineers) need to know why a machine learning system settled on a certain result.
In the case of the digital twin UAV, Willcox’s system is able to capture and communicate the evolving changes in the health of the UAV. It can also explain what sensor readings are indicating declining health and driving the predictions.
Real-Time Decision-Making at the Edge
The same pressures that require the use of physics-based models—the use of complex, high-dimensional models; the need for uncertainty quantification; the necessity of simulating all possible scenarios—also make the problem of creating predictive digital twins a computationally challenging one.
That’s where an approach called model reduction comes into play. Using a projection-based method they developed, Willcox and her collaborators can identify approximate models that are smaller, but somehow encode the most important dynamics, such that they can be used for predictions.
“This method allows the possibility of creating low-cost, physics-based models that enable predictive digital twins,” she said. […]
Read more – research.utexas.edu
Share this: