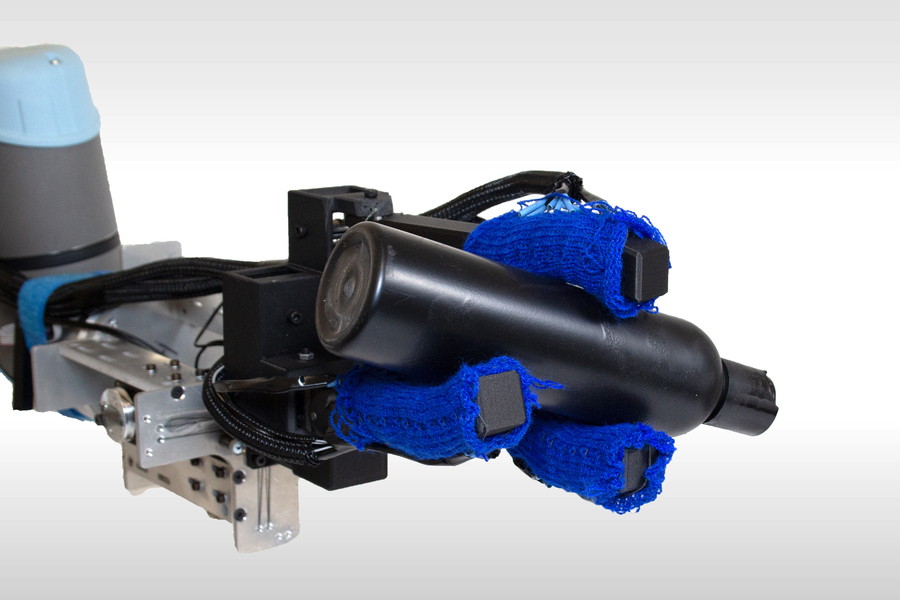
With modular components and an easy-to-use 3D interface, this interactive design pipeline enables anyone to create their own customized robotic hand.
Copyright: news.mit.edu – “A helping hand for robotic manipulator design”

MIT researchers have created an interactive design pipeline that streamlines and simplifies the process of crafting a customized robotic hand with tactile sensors.
Typically, a robotics expert may spend months manually designing a custom manipulator, largely through trial-and-error. Each iteration could require new parts that must be designed and tested from scratch. By contrast, this new pipeline doesn’t require any manual assembly or specialized knowledge.
Akin to building with digital LEGOs, a designer uses the interface to construct a robotic manipulator from a set of modular components that are guaranteed to be manufacturable. The user can adjust the palm and fingers of the robotic hand, tailoring it to a specific task, and then easily integrate tactile sensors into the final design.
Once the design is finished, the software automatically generates 3D printing and machine knitting files for manufacturing the manipulator. Tactile sensors are incorporated through a knitted glove that fits snugly over the robotic hand. These sensors enable the manipulator to perform complex tasks, such as picking up delicate items or using tools.
Thank you for reading this post, don't forget to subscribe to our AI NAVIGATOR!
“One of the most exciting things about this pipeline is that it makes design accessible to a general audience. Rather than spending months or years working on a design, and putting a lot of money into prototypes, you can have a working prototype in minutes,” says lead author Lara Zlokapa, who will graduate this spring with her master’s degree in mechanical engineering.
Joining Zlokapa on the paper are her advisors Pulkit Agrawal, professor in the Computer Science and Artificial Intelligence Laboratory (CSAIL), and Wojciech Matusik, professor of electrical engineering and computer science. Other co-authors include CSAIL graduate students Yiyue Luo and Jie Xu, mechanical engineer Michael Foshey, and Kui Wu, a senior research scientist at Tencent America. The research is being presented at the International Conference on Robotics and Automation.
Mulling over modularity
Before she began work on the pipeline, Zlokapa paused to consider the concept of modularity. She wanted to create enough components that users could mix and match with flexibility, but not so many that they were overwhelmed by choices.
She thought creatively about component functions, rather than shapes, and came up with about 15 parts that can combine to make trillions of unique manipulators.[…]
Read more: www.news.mit.edu


With modular components and an easy-to-use 3D interface, this interactive design pipeline enables anyone to create their own customized robotic hand.
Copyright: news.mit.edu – “A helping hand for robotic manipulator design”
MIT researchers have created an interactive design pipeline that streamlines and simplifies the process of crafting a customized robotic hand with tactile sensors.
Typically, a robotics expert may spend months manually designing a custom manipulator, largely through trial-and-error. Each iteration could require new parts that must be designed and tested from scratch. By contrast, this new pipeline doesn’t require any manual assembly or specialized knowledge.
Akin to building with digital LEGOs, a designer uses the interface to construct a robotic manipulator from a set of modular components that are guaranteed to be manufacturable. The user can adjust the palm and fingers of the robotic hand, tailoring it to a specific task, and then easily integrate tactile sensors into the final design.
Once the design is finished, the software automatically generates 3D printing and machine knitting files for manufacturing the manipulator. Tactile sensors are incorporated through a knitted glove that fits snugly over the robotic hand. These sensors enable the manipulator to perform complex tasks, such as picking up delicate items or using tools.
Thank you for reading this post, don't forget to subscribe to our AI NAVIGATOR!
“One of the most exciting things about this pipeline is that it makes design accessible to a general audience. Rather than spending months or years working on a design, and putting a lot of money into prototypes, you can have a working prototype in minutes,” says lead author Lara Zlokapa, who will graduate this spring with her master’s degree in mechanical engineering.
Joining Zlokapa on the paper are her advisors Pulkit Agrawal, professor in the Computer Science and Artificial Intelligence Laboratory (CSAIL), and Wojciech Matusik, professor of electrical engineering and computer science. Other co-authors include CSAIL graduate students Yiyue Luo and Jie Xu, mechanical engineer Michael Foshey, and Kui Wu, a senior research scientist at Tencent America. The research is being presented at the International Conference on Robotics and Automation.
Mulling over modularity
Before she began work on the pipeline, Zlokapa paused to consider the concept of modularity. She wanted to create enough components that users could mix and match with flexibility, but not so many that they were overwhelmed by choices.
She thought creatively about component functions, rather than shapes, and came up with about 15 parts that can combine to make trillions of unique manipulators.[…]
Read more: www.news.mit.edu
Share this: